This article is a summary of talk
- Fisher information matrix can be used in SLAM to determine the quality of pose estimation. The SLAM problem can be converted to a minimization problem, and we can solve it iteratively, and the Fisher information matrix can be obtained via the Jacobians
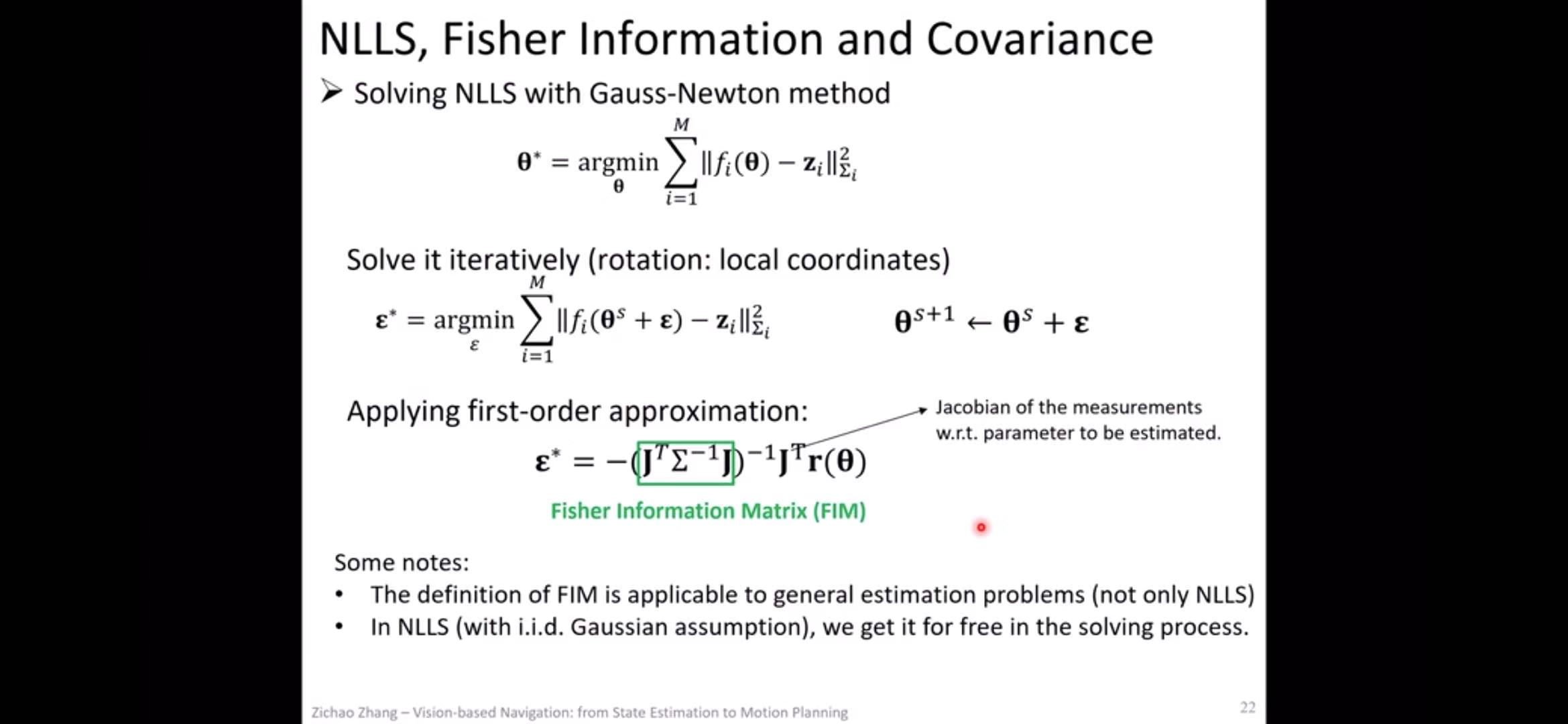
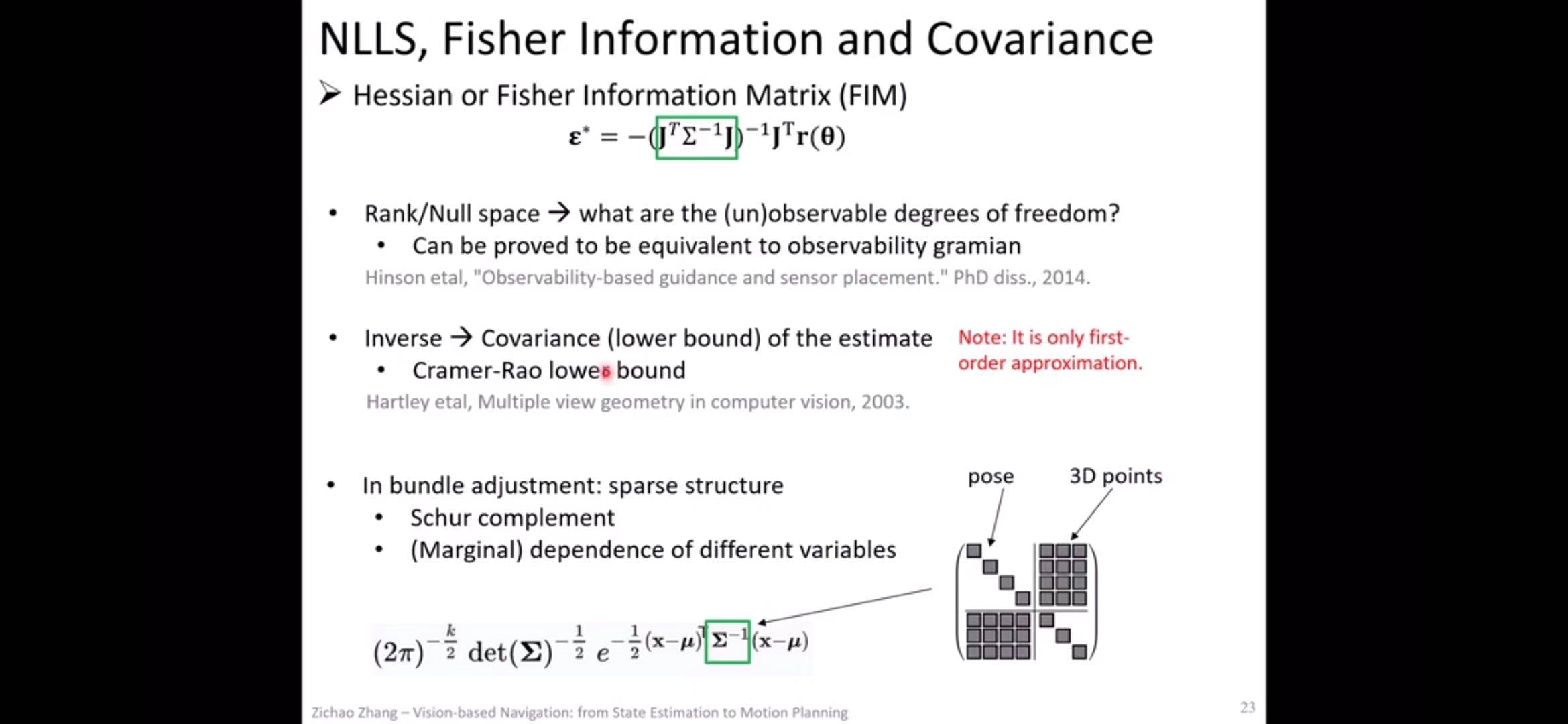
- The Fisher information matrix is related to the observability of the system, as well as the estimation covariance
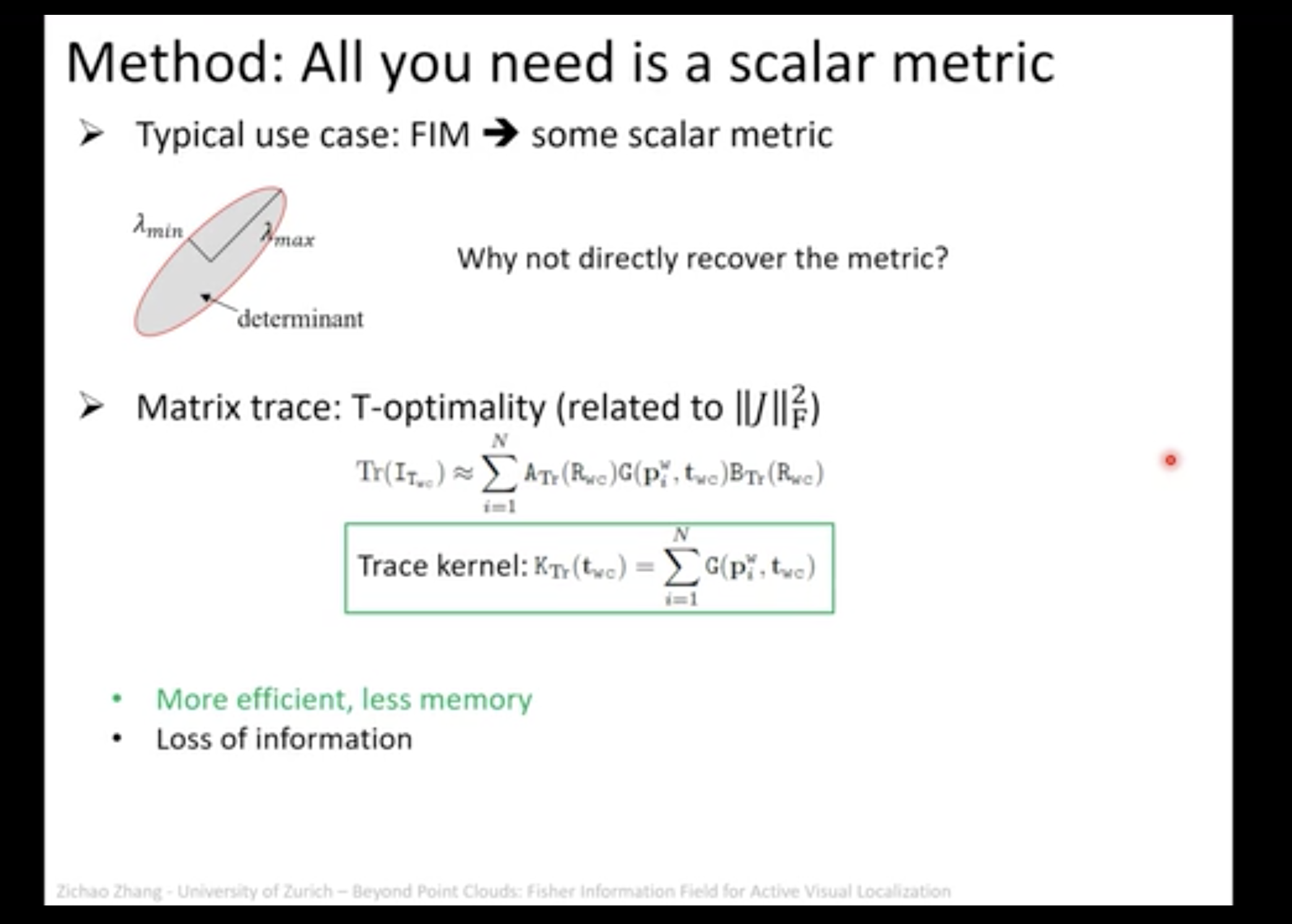
- To use the Fisher information matrix to check whether the quality is good, we need a scalar. One way is to compute the trace
- Fisher information matrix can also be used in active planning, we can use that to infer the quality of the parameter estimation and plan the path accordingly to avoid textureless scene, since that type of scene is difficult for SLAM
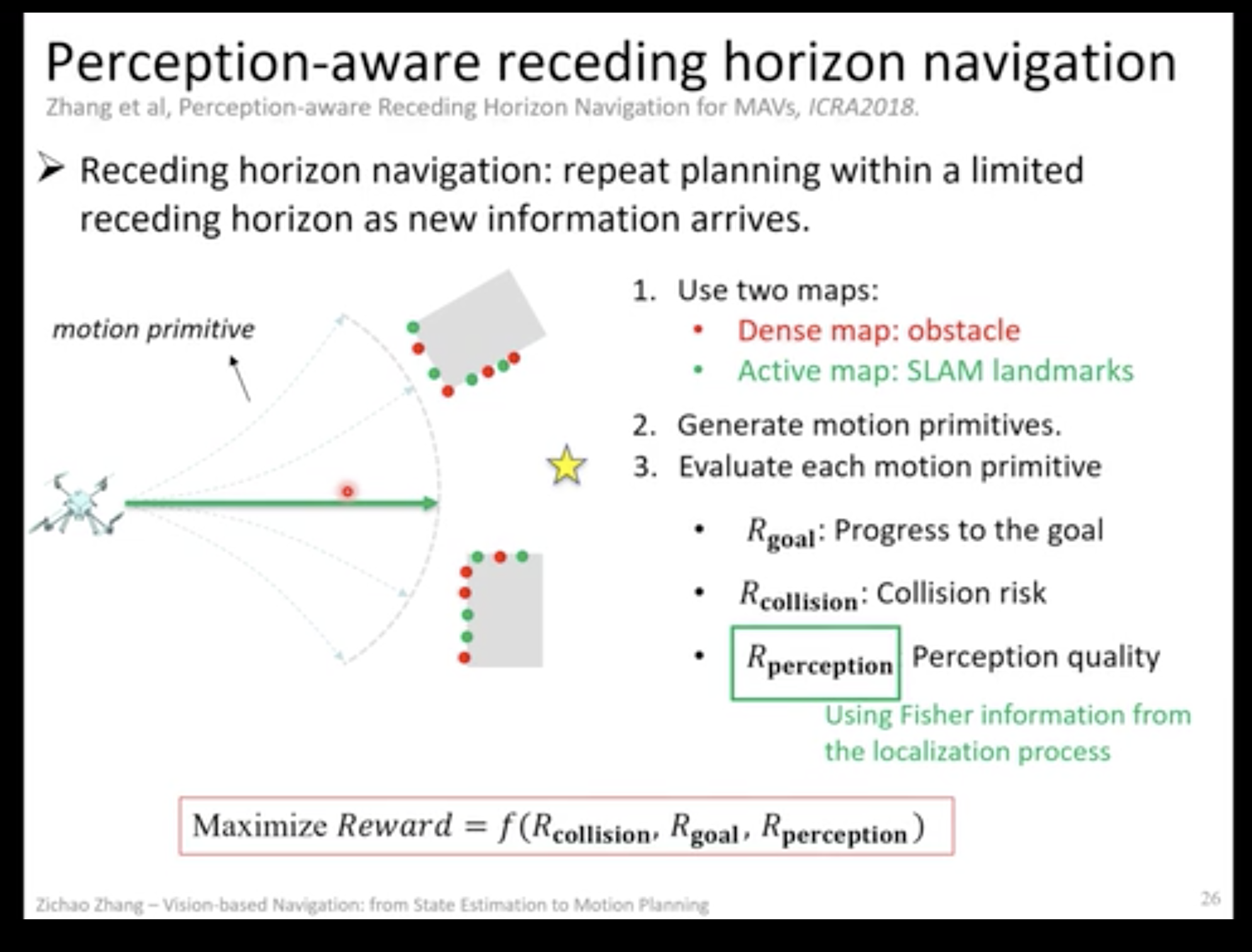
- however, different cost terms in path planning need to have hand-crafted weights, and is difficult to generalize for different environment. Eg. when feature landmarks are on the obstacles, on one hand we need to observe the landmarks, on the other hand we need to avoid the obstacles. So we have to balance the terms.