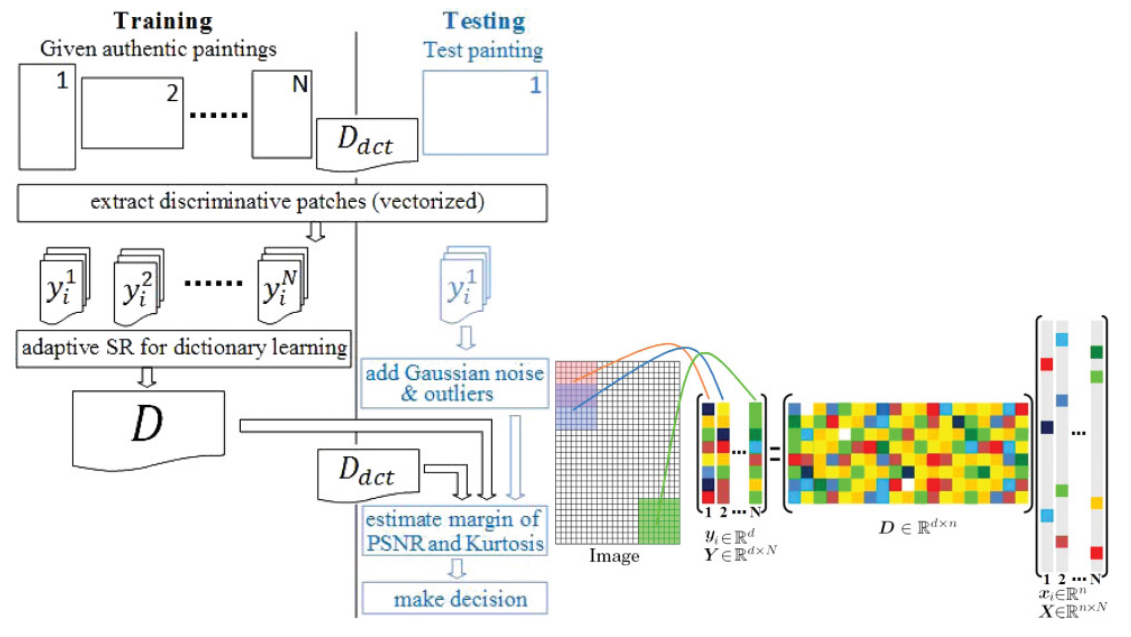
Zhi Gao, Mo Shan, and Qingquan Li. Adaptive sparse representation for analyzing artistic style of paintings. Journal on Computing and Cultural Heritage (JOCCH) 8.4 (2015): 22.
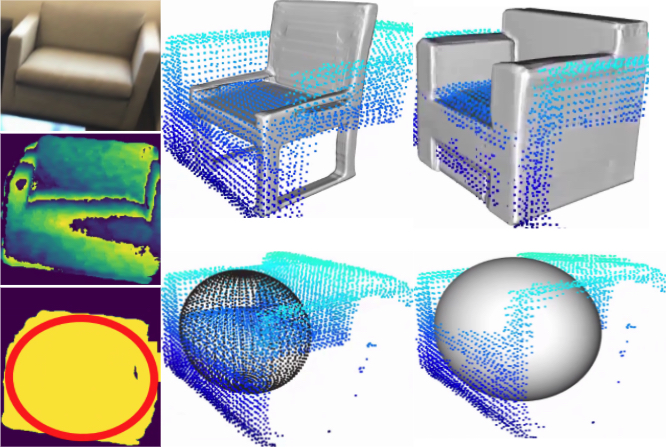
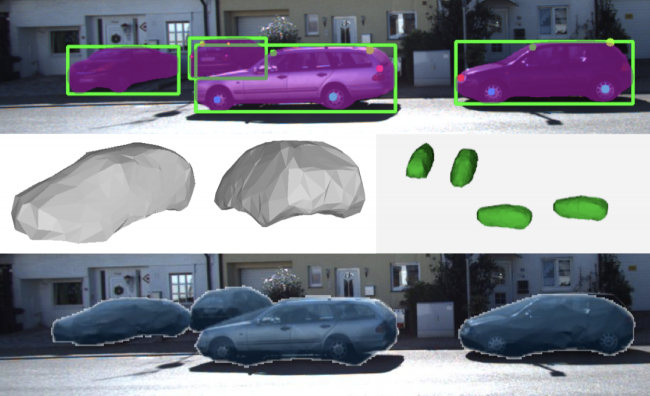
M. Shan, Q. Feng, Y. JAU, N. Atanasov. (2021). ELLIPSDF: Joint Object Pose and Shape Optimization with a Bi-level Ellipsoid and Signed Distance Function Description. In IEEE/RSJ International Conference on Computer Vision (ICCV). Montreal, Canada.

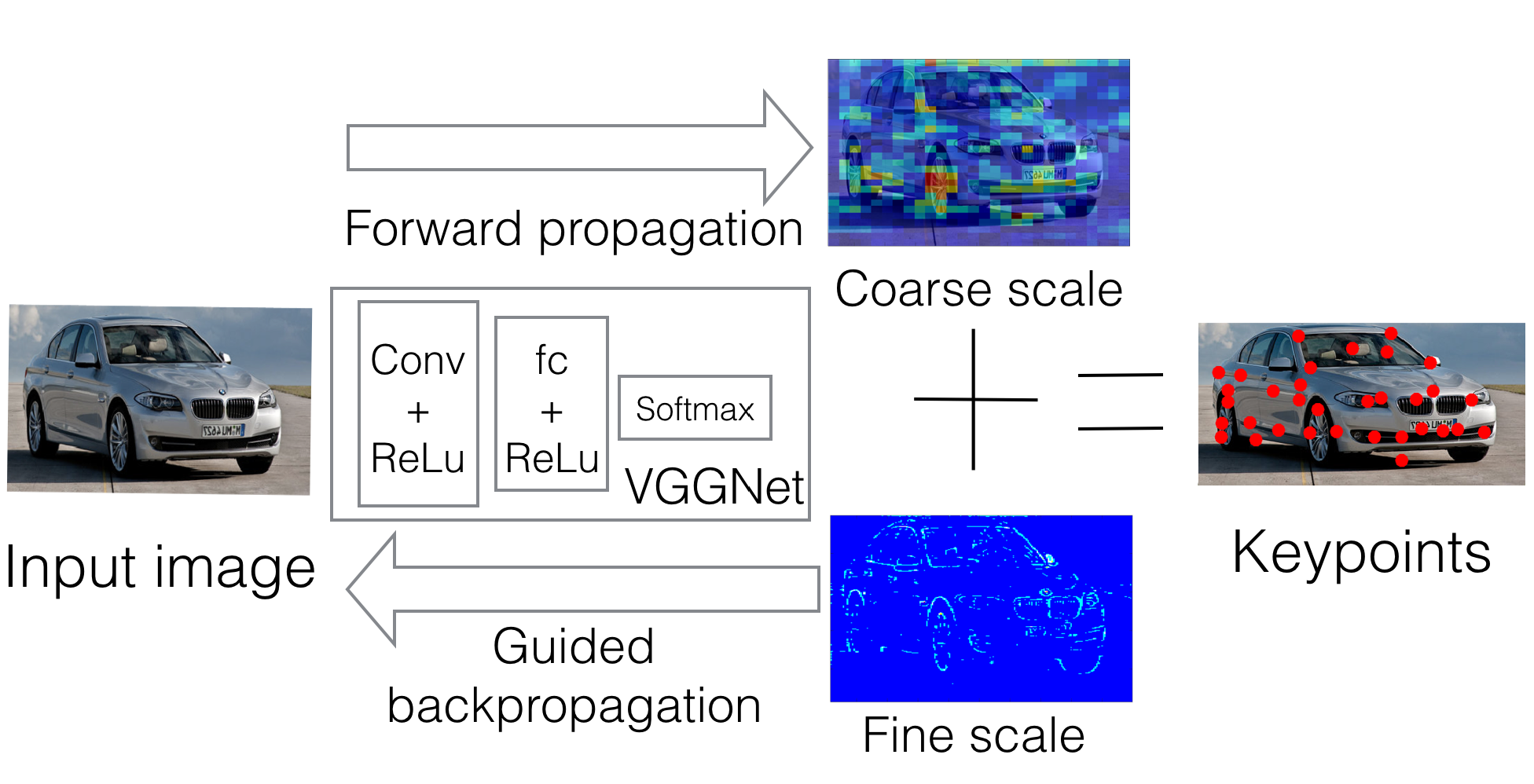
M. Shan, Q. Feng, N. Atanasov. (2020). OrcVIO: Object residual constrained Visual-Inertial Odometry. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA.
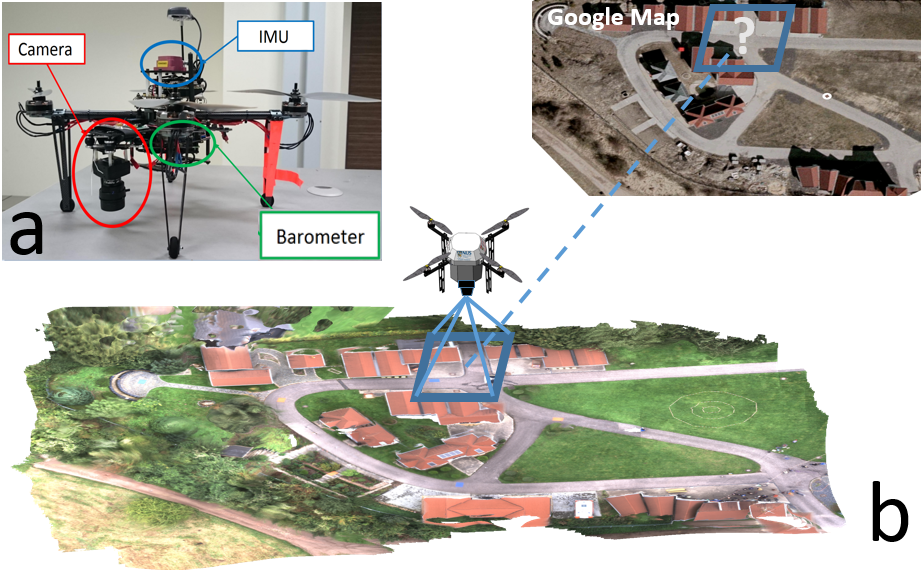
Mo Shan, Fei Wang, Feng Lin, Zhi Gao, Ya Z. Tang, Ben M. Chen. (2015). Google Map Aided Visual Navigation for UAVs in GPS-denied Environment. In IEEE International Conference on Robotics and Biomimetics (ROBIO). Zhuhai, China.
[Paper] [Poster] [Oral presentation] [Slides] [Demo video] [Dataset] [PaoPao Robot Talk] [Talk Q&A] [Talk Slides] [Preprint]
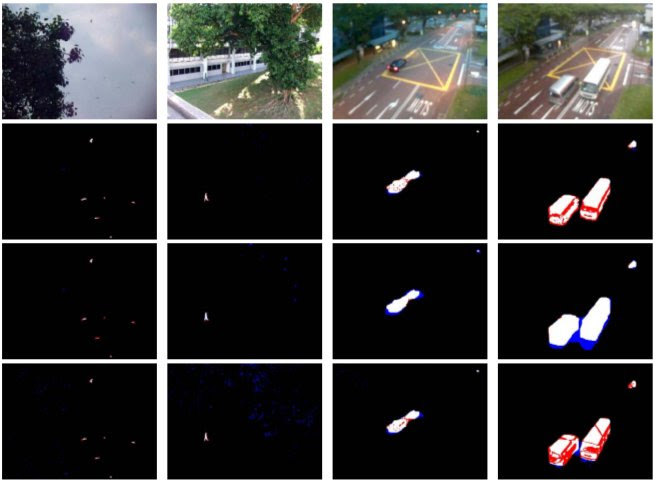
Zhi Gao, Loong-Fah Cheong, and Mo Shan. (2012). Block-sparse RPCA for consistent foreground detection. In IEEE European Conference on Computer Vision (ECCV). Florence, Italy.